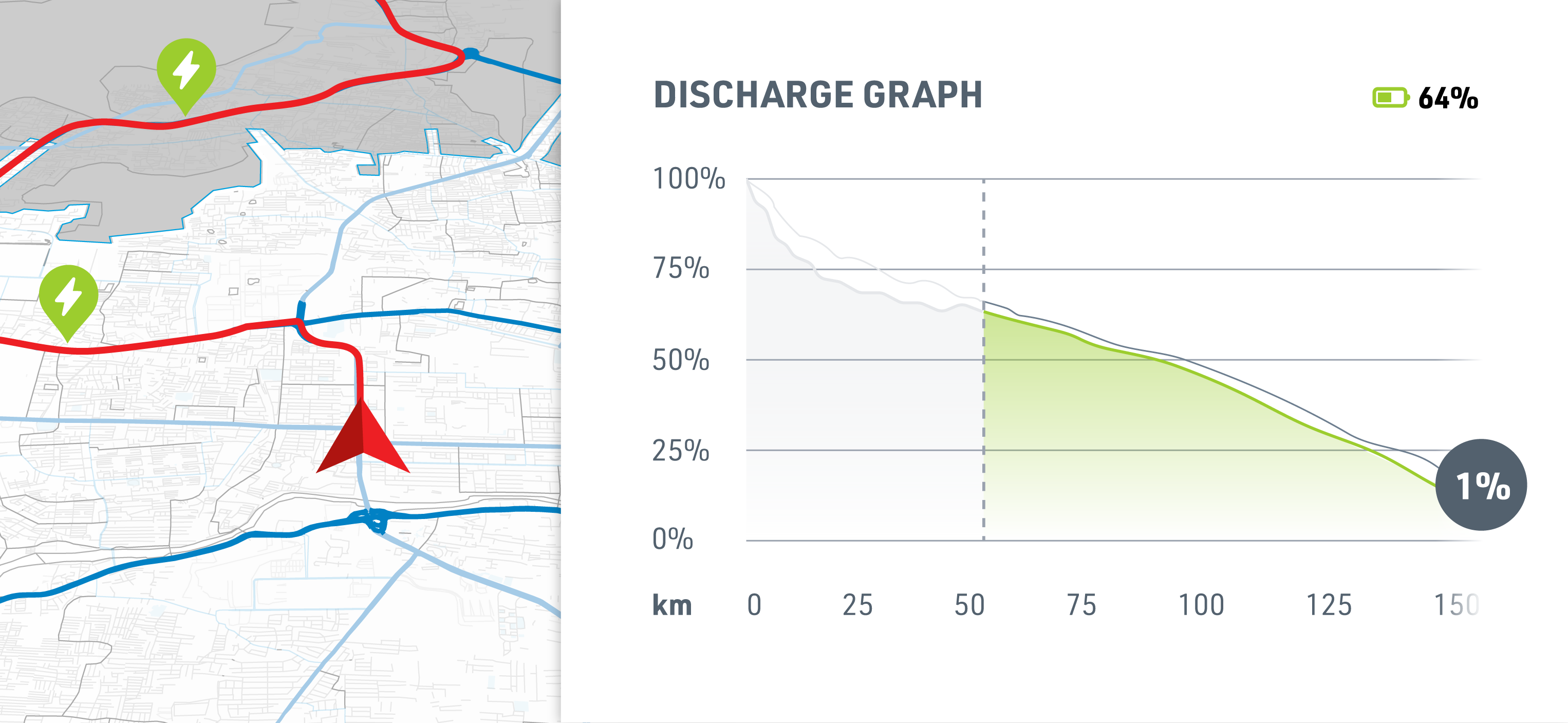
Estimate the EV Driving Range with a continuous refinement
Which approach could yield far better and more consistent results than physics-based battery discharge models?
Suppose we could somehow learn how the car battery discharges on one journey.
In that case, we could have a mechanism to estimate the battery consumption on a similar one.
Furthermore, suppose we could find a technique to continuously update our knowledge on battery consumption on all future journeys.
In that case, we'd get a robust and sustainable instrument for estimating battery consumption on any kind of journey.
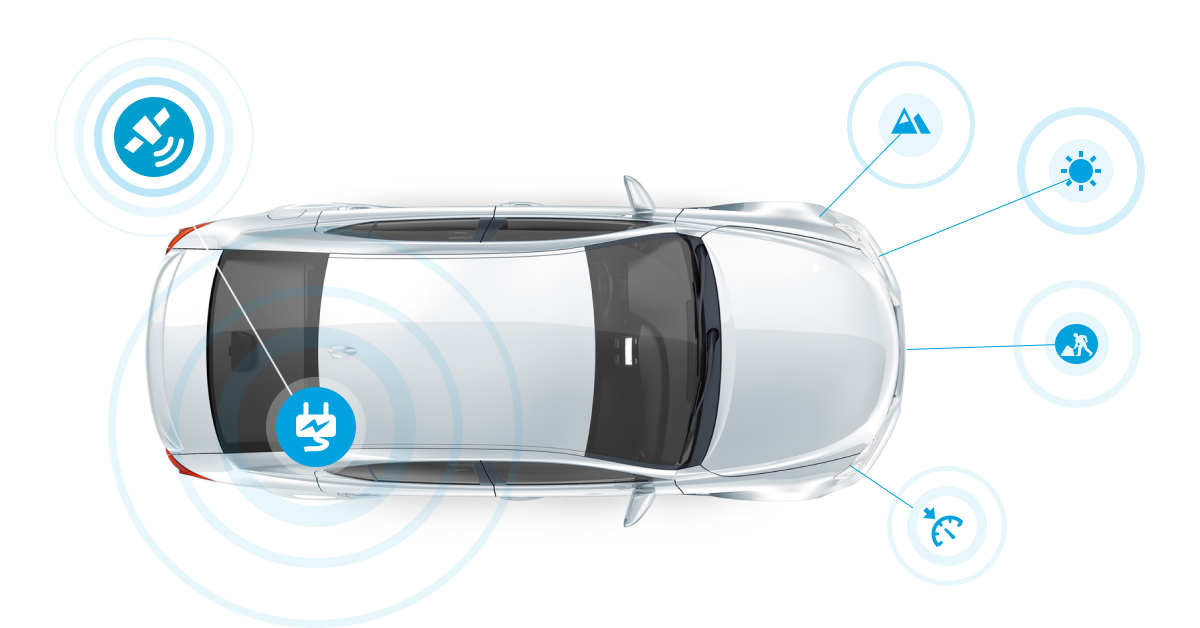
Machine learning algorithms (ML) do precisely that - learn how an actual car driven by an actual driver consumes energy in different circumstances and learns how much each input journey feature affects battery consumption. You can think of it as how a child learns through constant experiences and replication.
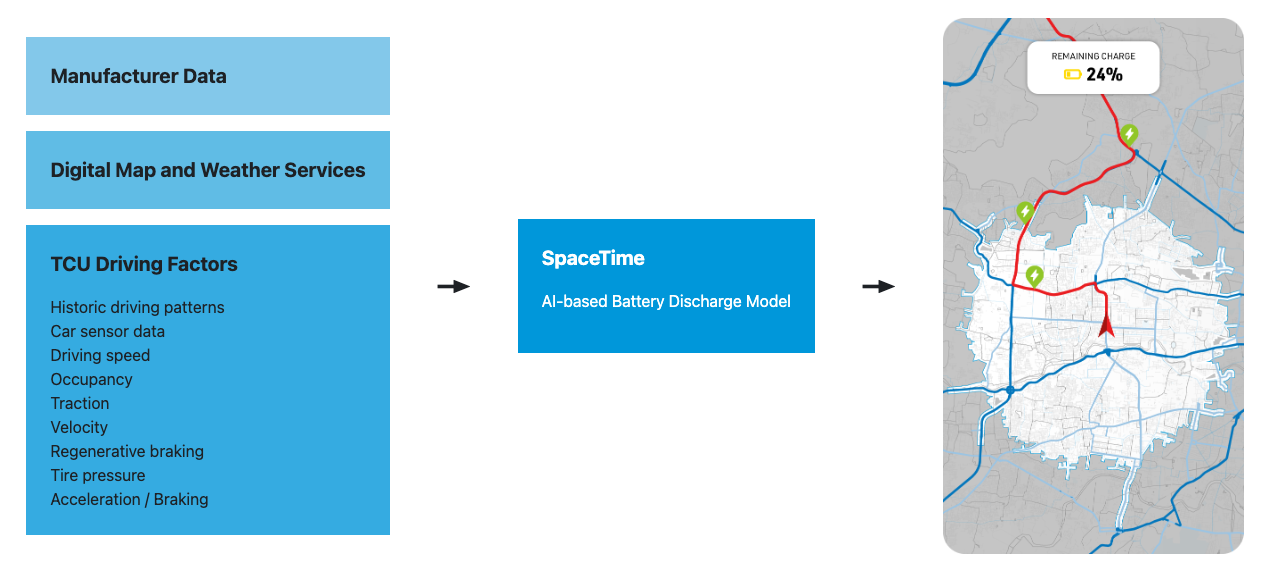
Combining machine learning as base elements, we can build an artificial intelligence (AI) battery consumption algorithm that will, with great precision, be able to estimate the required energy on any journey and, more importantly, continuously refine itself.

Speaking in terms of ML, the goal should be to:
- model the real-world drives and predict energy continuously accurately
- adapt to the new conditions, even to those not present in the learning phase, such as personal driving styles
- adapt to hidden (directly unmeasurable) factors, such as the car's air resistance mentioned above
The art of ML is to select the features that are significantly correlated with the output battery consumption and then train the model to find the connection between those two - to determine the contributions of each feature in the overall energy consumption.
If our AI model can learn how the EV car battery discharges on a Milan - Rome trip, it would know to estimate the battery consumption for all subsequent Milan - Rome journeys. However, the model wouldn't out-of-the-box know to predict the battery consumption on a Madrid - Barcelona trip.
The secret ingredient to help the model would be to break down the Milan - Rome trip into smaller distinctive parts and to build its knowledge about energy consumption on each trip part. Estimating the battery consumption on any new journey would be almost equivalent to collecting the energy consumption on all distinctive comprising parts.